Section:
New Results
Soft robots locomotion and manipulation control using FEM simulation and quadratic programming
In this work, we proposed a method to control the motion of soft robots able to manipulate objects or roll from one place to another. We used the Finite Element Method (FEM) to simulate the deformations of the soft robot, its actuators, and its environment. To find the inverse model of the robot interacting with obstacles, and with constraints on its actuators, we wrote the problem as a quadratic program with complementarity constraints. The novelty of this work was that friction contacts (sticking contact only) is taken into account in the optimization process, allowing the control of these specific tasks that are locomotion and manipulation. We proposed a formulation that simplifies the optimization problem, together with a dedicated solver [22]. The algorithm had real-time performance and handles evolving environments as long as we know them. To show the effectiveness of the method, we presented several numerical examples, and a demonstration on a real robot (see Figure 2 and 3).
Figure
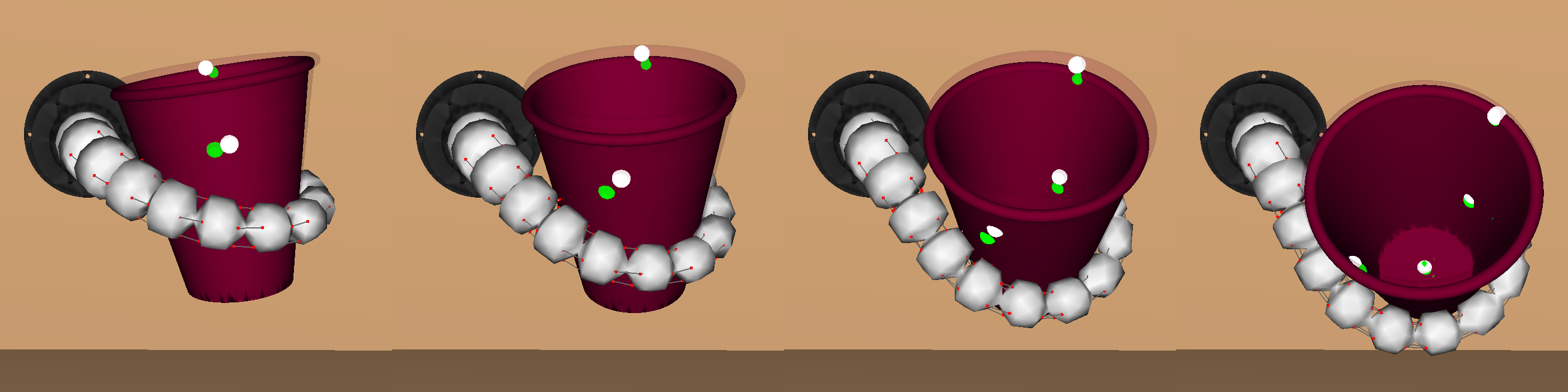
2. Simulation of a soft gripper holding a deformable cup subject to gravity. Here we optimize the cables displacements to control the position/orientation of the cup. A phantom of the cup target is shown in transparency. The cup have four controlled points represented by the green spheres. The corresponding targets are represented by the white spheres.
|
|
Figure
3. Real soft robot actuated online using the output of the simulation. In this scenario, using our control framework, we are able to control the orientation of the real plastic cup (see the attached video).
|
|